

Серия МЭП (справочно)
Внимание! Большинство типоразмеров серии МЭП сняты с производства в связи с запуском серий МЭП-С, МЭП-В, МЭП-РВ. Для подбора аналогов из новой линейки посетите соответствующие разделы либо обратитесь к специалистам предприятия.
Состав исполнительных механизмов электрических прямоходных МЭП
- Трехфазный асинхронный электродвигатель *
- Винтовая передача
- Редуктор
- Узел ручного привода
- Блок концевых выключателей
- Датчик положения с унифицированным токовым выходом **
* за исключением отдельных типоразмеров МЭП ** наличие этого узла согласуется дополнительно
Основные конструктивные исполнения механизмов электрических прямоходных МЭП
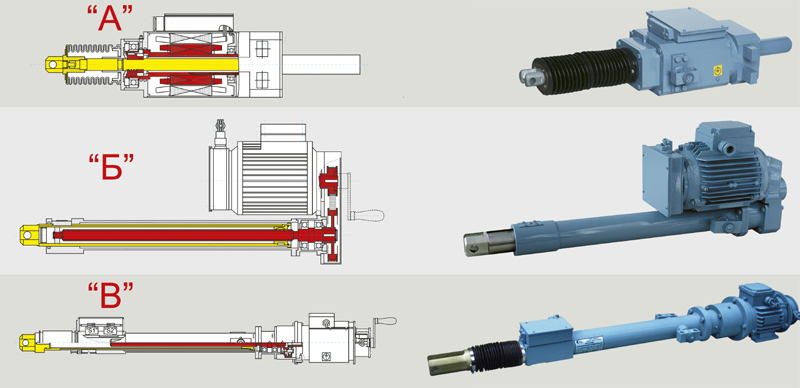
Принцип действия исполнительных механизмов электрических прямоходных МЭП
В МЭП исполнения "А" при подаче прямого напряжения на электродвигатель ротор электродвигателя и скрепленная с ним через редуктор гайка винтовой передачи приходят во вращение, при этом винт, закрепленный своим концом на рабочем органе, совершает поступательное движение. Блок радиально-упорных подшипников воспринимает возникающие осевые усилия.
В МЭП исполнения «Б» при подаче напряжения на электродвигатель ротор электродвигателя через редуктор или зубчато-ременную передачу приводит во вращение винт винтовой пары. При этом гайка вместе со штоком, в котором она установлена, движется поступательно, перемещая рабочий орган.
В МЭП исполнения "В" ротор электродвигателя через редуктор приводит во вращение винт винтовой пары. При этом гайка вместе со штоком, в котором она установлена, движется поступательно, перемещая рабочий орган.
Для ограничении хода штока МЭП используются концевые выключатели. Настройка концевых выключателей позволяет уменьшить рабочий ход на 80 мм от номинального значения рабочего хода с каждой стороны (минимальное и максимальное положения штока).
Ручной привод позволяет при отсутствии электропитания перемещать рабочий орган вручную поворотом рукоятки. При работе электродвигателя рукоятка ручного привода неподвижна. Предусмотрена защита от внезапной подачи напряжения на электродвигатель в режиме работы ручным приводом.
Выводы от электродвигателя, концевых выключателей и датчика положения подключены к клеммникам или штепсельным разъемам, расположенным в коробке выводов. На внутренней стороне крышки коробки выводов закреплена пластина со схемой внутренних соединений всех элементов МЭП.
Для защиты винтовой передачи от внешних воздействий в механизмах исполнения "А" используются резиновые гофры, в МЭП исполнениях "Б" и "В" сальники. Механические упоры ограничивают перемещение штока МЭП при его втягивании или выдвижении.
Датчик положения формирует токовый сигнал, пропорциональный перемещению штока исполнительного механизма. Этот сигнал может быть использован как для индикации, так и для замыкания обратной связи в системе автоматического регулирования.